Infinitesimal Deformation Linear Elasticity Static Analysis
Infinitesimal Deformation Linear Elastic Static Analysis
In this section, the elastic static analysis is formulated on the basis of the infinitesimal deformation theory, which assumes linear elasticity as a stress-strain relationship.
Basic equations
The equilibrium equation, mechanical boundary conditions, and geometric boundary conditions (basic boundary conditions) of solid mechanics are given by the following equations (see Fig. 2.1.1):
∇⋅σ+¯b=0in V
σ⋅n=¯ton St
u=¯uon Su
where σ, ¯t and St denote stress, surface force, and body force, respectively. St and Su represent the geometric and mechanical boundaries, respectively.
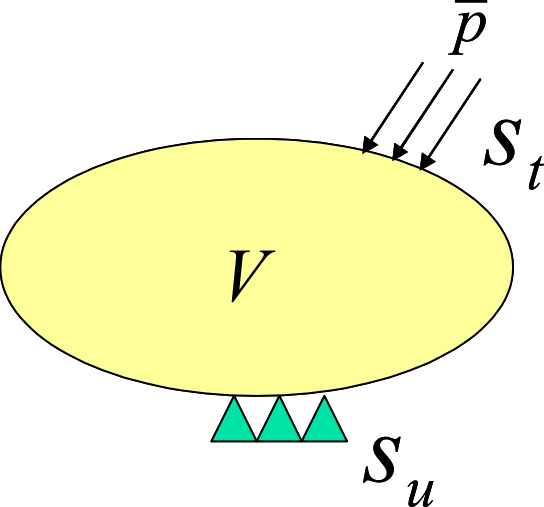
Fig. 2.1.1 Boundary value problem in solid mechanics (infinitesimal deformation problem)
The strain-displacement relation in infinitesimal deformation problems is given by the following equation:
ε=∇Su
Furthermore, the stress-strain relationship (constitutive equation) in linear elastic bodies is given by the following equation:
σ=C:ε
where, C is a fourth-order elasticity tensor.
Principle of Virtual Work
The principle of the virtual work related to the infinitesimal deformation linear elasticity problem, which is equivalent to the basic equation Eq.(1), Eq.(2) and Eq.(3), is expressed as:
∫Vσ:δεdV=∫St¯t⋅δudS+∫V¯b⋅δudV
δu=0on Su
Moreover, considering the constitutive equation Eq.(5), Eq.i(6), is expressed as follows:
∫V(C:ε):δεdV=∫St¯t⋅δudS+∫V¯b⋅δudV
In Eq.(8), ε is the strain tensor and C is the forth-order enasticity tensor. In this case, if the strain tensor σ and ε are represented by vector formats ˆσ and ˆε, respectively, the consitutive equation Eq.(5) is expressed as follows
ˆσ=Dˆε
where D is an elastic matrix.
Considering that the ˆσ, ˆε and Eq.(9) are expressed in vector format, Eq.(8) is expressed as follows:
∫VˆεTDδˆεdV=∫StδuT¯tdS+∫VδuT¯bdV
Eq.(10) and Eq.(7) are the principles of the virtual work discretized in this development code.
Formulation
If the principle of virtual work, Eq.(10), is discretized for each finite element, the following equation is obtained:
∑e=∫VeˆεTDδˆεdV=∑e∫SetδuT¯tdS+∑e∫VeδuT¯bdV
Using the displacement of the nodes that compose each element, the displacement field is interpolated as follows:
u=m∑i=1Niui=NU
The strain at this moment, using Eq.(4), is given as follows:
ˆε=BU
When Eq.(12) and Eq.(13) are substituted into Eq.(11), the following equation is obtained:
∑eδUT(∫VeBTDBdV)U=∑eδUT⋅∫SetNT¯tdS+∑eδUT∫VeNT¯bdV
Eq.(14) can be summarized as
δUTKU=δUTF
In this case, the components of the matrix and vector defined by Eq.(16) and Eq.(17) can be calculated for each finite and overlapped element:
K=∑e∫VeBTDBdV
F=∑e(∫SetNT¯tdS+∫VeNT¯bdV)
if Eq.(15) is true for an arbitary virtual displacement δU, tha following equation is obtained:
KU=F
Meanwhile, the displacement boundary conditioni Eq.(3) is expressed as follows:
U=¯U
By solving Eq.(18) based on the constraint condition Eq.(19), it is possible to define the node displacement U.